



RoboClaw 2x30A USB V6B - двухканальное управление двигателем 34В/30А - Pololu 3684
- В наличии
- Оптом и в розницу
- Код: Biz1992518881
13 685 ₴
Показать оптовые цены
Описание товара: RoboClaw 2 x 30 A USB V6B — двухканальное управление двигателем 34 В/30 А — Pololu 3684
RoboClaw от Pololu — это высокопроизводительный контроллер двигателя постоянного тока для приложений, требующих высокой производительности и точного управления. С возможностьюдва двигателя одновременноRoboClaw V6B предлагает гибкость и универсальность, которые имеют решающее значение в проектах робототехники и промышленной автоматизации. Контроллер поддерживает различные протоколы связи, включаяСигналы USB, TTL UART, I2C и ШИМ, что позволяет легко интегрировать его в различные микропроцессорные платформы. ИнтегрированныйПИД-система управленияпозволяет точно контролировать скорость, положение и крутящий момент, а такжеподдержка квадратурных энкодеровобеспечивает точное отслеживание положения и скорости двигателей. RoboClaw V6B также оснащен расширенными функциями защиты, такими какЗащита от перегрева, тока и перенапряженияоборудовано для обеспечения надежности и безопасности в суровых условиях.
Производитель предлагает:
- Подробное руководство пользователя
- Библиотека для пользователей Arduino.
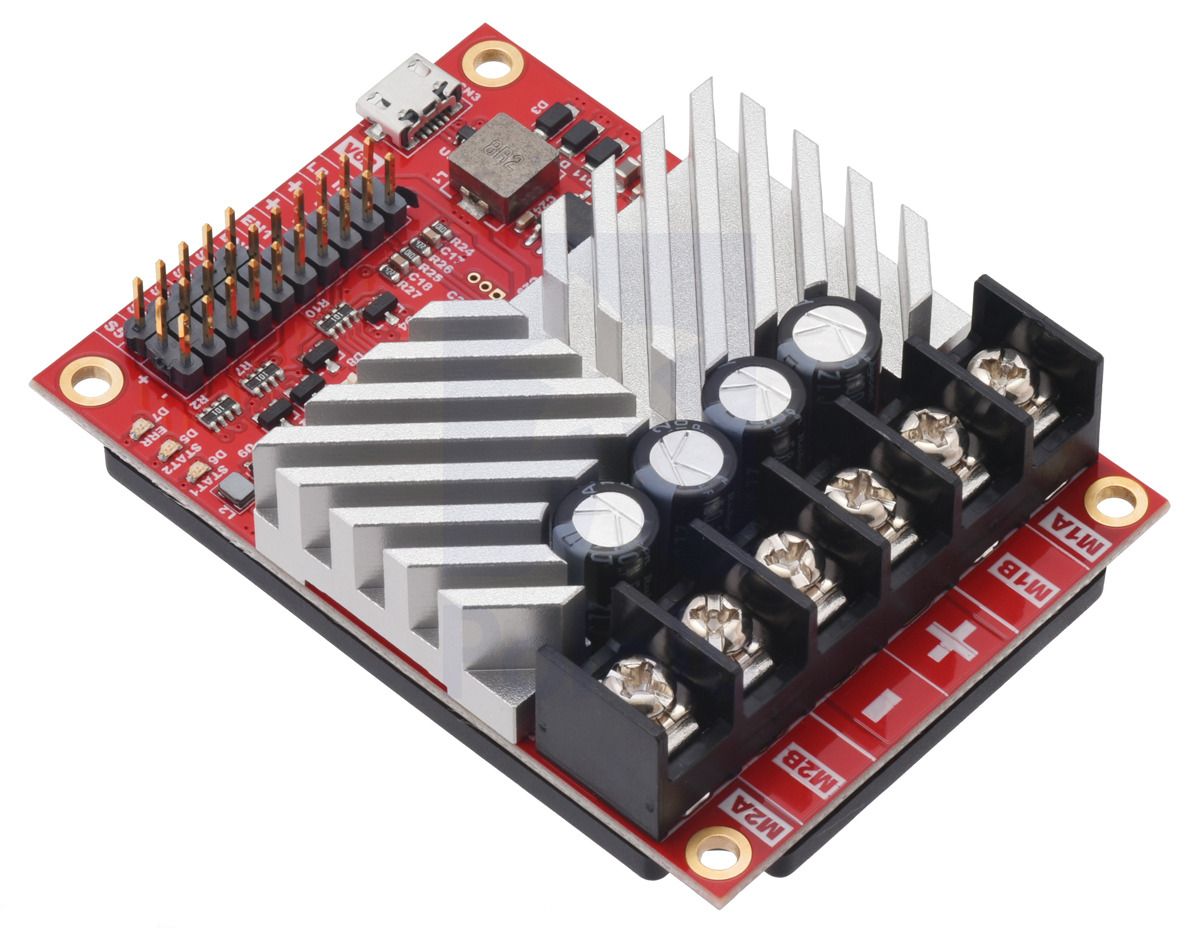
Двухканальный контроллер двигателя RoboClaw 2 x 30 А USB V6B 34 В/30 А — Pololu 3684.
Устройство позволяет управлять двумя двигателями постоянного тока с длительным током до 30 А.на канал.
Ключевые особенности управления RoboClaw
- Простое двунаправленное управление двумя щеточными двигателями постоянного тока.
- Напряжение питания: от 6В до 34В
- Непрерывный ток на канал: до 30 А
- Пиковый ток: до 60А
- Автоматическое ограничение тока сокращает рабочий цикл, когда температура превышает 85°C.
- Общение:
- USB-интерфейс (виртуальный COM-порт)
- Последовательный интерфейс ТТЛ
- Радиоимпульсный (RC) интерфейс
- Аналоговый интерфейс напряжения от 0 В до 2 В (выдерживает 5 В)
- Два входа обратной связи для ПИД-регулирования с обратной связью:
- Возможность подключения квадратурных энкодеров с разрешением до 19,6 млн импульсов в секунду.
- Управление положением через аналоговые энкодеры (потенциометры)
- Возможность работы без обратной связи, так называемое разомкнутое управление.
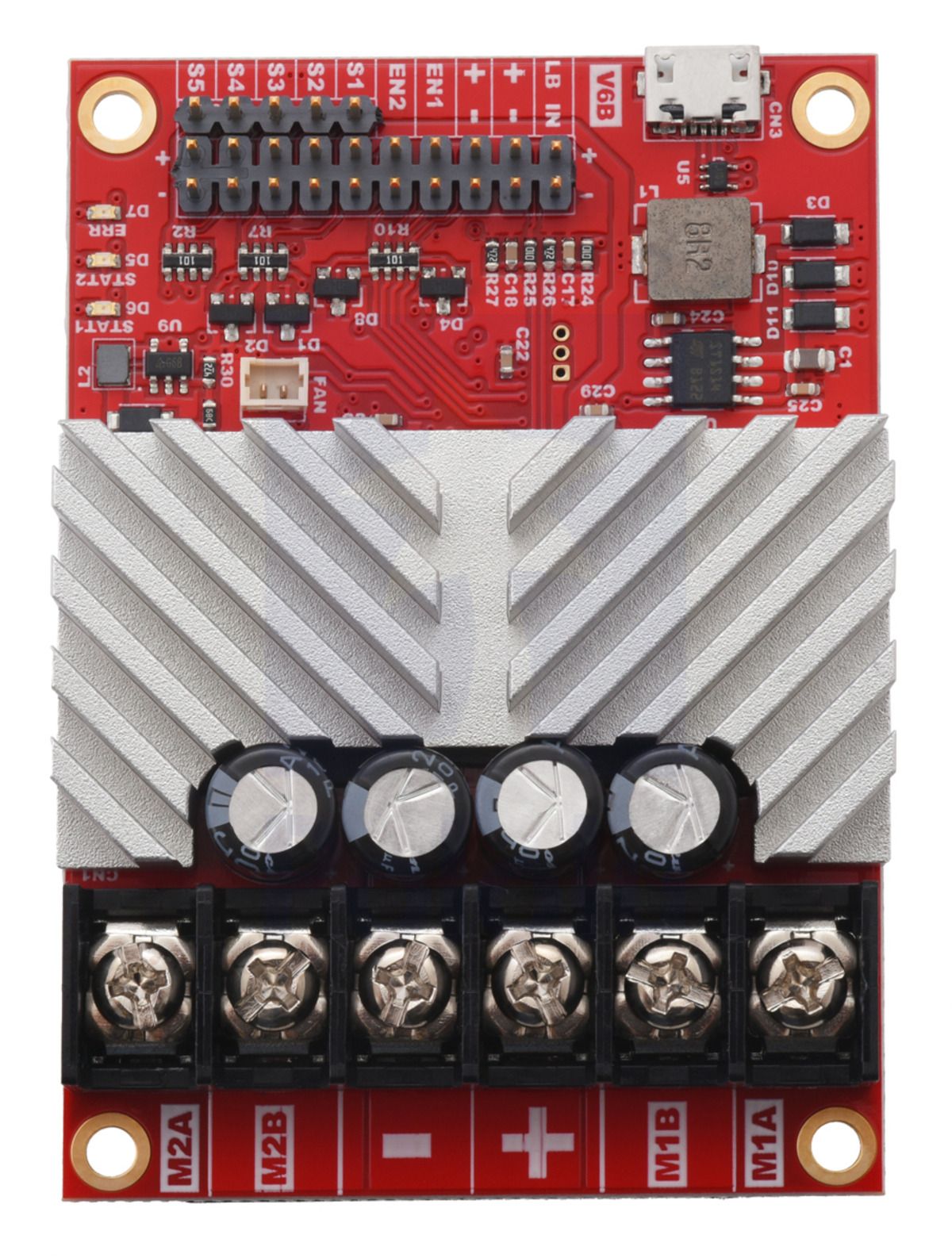
- Присоединенная винтовая клемма для легкого подключения.
- Настраивается через USB
- Возможность включения контроллера BEC через перемычку.
- Контроль заряда аккумулятора, отключение напряжения, если напряжение слишком низкое
- Размеры платы: 74 х 52 х 17 мм.
- Вес: 60 г
Приложения RoboClaw
RoboClaw 2 x 30 A V6B идеально подходит для различных приложений робототехники и автоматизации:
- Мобильные роботыУправление крупными роботами, в том числе колесными и гусеничными, требующими высокой производительности и точности.
- Манипуляторы и роботизированные руки: Точный контроль положения и скорости в приложениях, требующих высокой точности.
- Автотоварыномные транспортные средстваУправление приводными двигателями автономных транспортных средств, работающих в условиях труднопроходимой местности.
- Подвесы и системы стабилизацииТочное управление двигателями в системах стабилизации камеры, требующих быстрого реагирования на изменения положения.

RoboClaw работает с логическими напряжениями 5 В и 3,3 В.
Сравнение контроллеров RoboClaw
| 2х7А | 2х15А | 2х30А | 2х45А | 2х60А | |
|---|---|---|---|---|---|
| Количество каналов: | 2 | ||||
| Напряжение: | от 6 В до 34 В | ||||
| Непрерывный поток: | 7,5 А | 15 А | 30 А | 45 A | 60 A |
| Мгновенный ток: | 15 А | 30 А | 60 A | 60 A | 120 A |
| Мощность BEC 5 В: | 1,2 A | 3 А | 3 А | 3 А | 3 А |
| Ширина: | 42 мм | 52 мм | 52 мм | 52 мм | 86 мм |
| Длина: | 48 мм | 74 мм | 74 мм | 74 мм | 100 мм |
| Вес: | 20 g | 60 g | 60 g | 60 g | 300 g |
| Основные атрибуты | |
|---|---|
| Производитель | Arduino |
| Тип | Аккумулятор |
- Цена: 13 685 ₴